En el camp matemàtic de l'anàlisi numèrica la interpolació per splines és una forma d'interpolació on l'interpolant és un tipus especial de funció polinòmica definida a trossos anomenada un spline. La interpolació per splines es prefereix sobre la interpolació polinòmica perquè l'error d'interpolació es pot fer petit fins i tot en utilitzar polinomis de graus baixos per l'spline. La interpolació per splines evita el problema del fenomen de Runge que ocorre en interpolar entre punts equidistants amb polinomis de graus alts.
Introducció
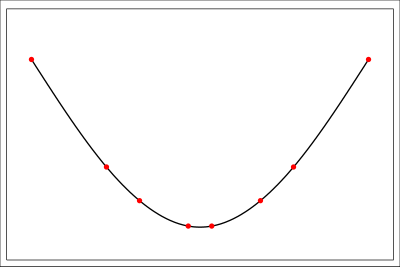
Els regles elàstics que es doblegaven per passar a través d'un cert nombre de punts predefinits (els "nodes") s'utilitzaven per a dibuixos tècnics a mà per a la construcció naval, com s'il·lustra a la figura 1.
Figura 1: Interpolació amb splines cúbics entre vuit punts. Els dibuixos tècnics dibuixats de mà es feien per construcció de vaixells etc. utilitzant regles flexibles que es doblegaven per seguir punts predefinits (els "nodes")
L'enfocament per imitar matemàticament la forma de tals regles elàstics fixats a n+1 "nodes" és interpolar entre tot parell de "nodes" i amb polinomis
La curvatura d'una corba
és
Com que el regle elàstic prendrà una forma que minimitza l'energia de flexió elàstica sota la restricció de passar a través de tots els "nodes" tant com seran continus a tot arreu, també als "nodes". Per aconseguir-ho s'ha de complir que
i que
per a tot i, . Això només es pot aconseguir si es fan servir polinomis del grau 3 o més alt. L'aproximació clàssica és de fer servir polinomis del grau 3, aquest és el cas dels "splines cúbics".
Algorisme per trobar que l'spline cúbic d'interpolació
Un polinomi de tercer ordre per al qual
es pot escriure de forma simètrica
(1)
on
(2)
i
(3)
(4)
Com que resulta que
(5)
(6)
Posant i a (5) i (6) s'obté de (2) que en efecte , i que
(7)
(8)
Si ara
són els n+1 punts i
(9)
on
són n polinomis de tercer grau que interpolen en l'interval per a tal que
per a
llavors els n polinomis junts defineixen una funció derivable a l'interval i
(10)
(11)
per a on
(12)
(13)
(14)
Si la successió és tal que a més a més
per a
la funció que resulta tindrà fins i tot una segona derivada contínua.
De (7), (8), (10) i (11) se segueix que aquest és el cas si i només si
(15)
per a
Les relacions (15) són n-1 equacions lineals per als n+1 valors de .
Per als regles elàstics que són el model per la interpolació per splines cal observar que a l'esquerra del primer node i a la dreta del últim el regle es pot moure lliurement i per tant prendrà la forma d'una recta amb . Com que ha de ser una funció contínua de es té que per als "Splines naturals" a més a més de les n-1 equacions lineals (15) s'ha d'imposar que
és a dir que
(16)
(17)
(15) juntament amb (16) i (17) constitueixen n+1 equacions lineals que defineixen de forma única els n+1 paràmetres de
Exemple
Figura 2: Interpolació amb splines cúbics "naturals entre tres punts.
En el cas de tres punts els valors per a es troben resolent el sistema d'equacions lineals