Gyrolaser

Un gyromètre laser ou gyrolaser est un capteur de vitesse angulaire (gyromètre) mettant en œuvre un rayon laser. Celui-ci parcourt un circuit optique dans les deux sens, l’interférence des deux rayons observée traduit la vitesse de rotation de l’ensemble.
Préambule
Le gyromètre laser est un capteur capable de mesurer une vitesse angulaire dans un plan. En associant trois gyromètres, il est possible de mesurer la vitesse angulaire d'un mobile dans l'espace. Cette mesure est utilisée dans les centrales à inertie qui équipent certains navires, avions, satellites, sous-marins.
Le gyromètre laser offre une meilleure précision que les gyroscopes mécaniques utilisés précédemment.
Description

Le premier gyrolaser fut présenté aux États-Unis par Macek et Davis en 1963. La technologie a depuis été développée et industrialisée par un nombre restreint de sociétés dans le monde. Cette technologie inertielle de haute performance est actuellement la plus diffusée. Plus d'un million de gyrolasers sont utilisés dans le guidage inertiel[1] et plusieurs centaines de milliers en navigation inertielle, domaine dans lequel ils ont prouvé une très grande fiabilité, avec une incertitude inférieure à 0,01° par heure et un temps moyen entre pannes supérieur à 300 000 heures.
Contrairement au gyromètre mécanique, le gyrolaser n’est pas sensible à l’accélération ; de plus, il a une meilleure stabilité du facteur d’échelle[C'est-à-dire ?]. Enfin, il est plus fiable, en raison de l’absence de pièce mécanique en mouvement[2]. Certaines erreurs peuvent être caractérisées, comme l’erreur autour de zéro. La précision augmente lorsque la taille de l’instrument augmente[3].
Le gyrolaser est également très robuste et très peu sensible aux perturbations engendrées par son environnement (température, vibrations et chocs) car il repose sur une conception monolithique de sa partie optique qui est usinée au sein d'un bloc de vitrocéramique.
Principe physique

La mesure de la vitesse angulaire est une application de l’effet Sagnac. On considère un trajet optique circulaire (rayon R) dans le vide animé d’un mouvement de rotation à la vitesse . Après un temps , le point P est placé à la position P'. Deux rayons laser parcourent le trajet en sens inverse. La différence de chemin optique pour un sens de rotation donné est alors proche de où c est la vitesse de la lumière. Cette expression s’écrit aussi (avec S la surface limitée par le cercle décrit) et se généralise pour toutes les surfaces[4].





Démonstration
- Le bloc est immobile
Le rayon lumineux effectue le trajet optique avec une durée .

- le bloc est animé d’une vitesse , on considère le rayon se déplaçant dans le même sens que le bloc.
Le point P se déplace au point P', et .


En combinant les trois précédentes équations on obtient (car ) et .



On a donc et donc .


La différence de chemins optiques dû à la rotation est donc voisin de où S est la surface limitée par le cercle décrit.

- En faisant le même raisonnement pour l’autre rayon, on obtient une différence de chemin optique en P' entre les deux rayons [5].

On obtient la même relation en tenant compte des indices de réfraction et de la relativité restreinte[4].
L'observation de l’interférence permet d’accéder à la différence de chemin optique et donc à la vitesse de rotation.
La précision est directement proportionnelle à la surface S et s’accroît donc avec la taille de l'instrument.
Il existe deux types de gyromètres optiques : le gyromètre laser (ou gyrolaser) et le gyromètre à fibre optique.
Particularités du gyrolaser
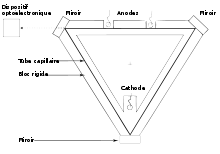
L’appareil comporte une partie optique et une partie électronique. Il est de forme triangulaire ou carrée.
La partie optique comporte des miroirs et un tube capillaire rempli d’un mélange gazeux qui constitue le milieu amplificateur du laser. Le premier miroir est concave, pour améliorer la focalisation, le deuxième est fixé sur un moteur piézoélectrique, ce qui permet de moduler la puissance du laser, et le troisième est semi-réfléchissant, ce qui permet de récupérer une partie du faisceau[6].
Certains gyromètres sont triaxes, en forme de tétraèdre[7].
Exemples de véhicules ou armes utilisant le gyrolaser
- Tous les avions de transports civils de premier niveau (notamment les Airbus[8] et Boeing[9]) utilisent des centrales de navigation à gyrolasers
- La plupart des avions d'armes et des avions de transport militaire (Rafale, F-15E Strike Eagle, HAL Tejas...)
- La plupart des hélicoptères d'attaque et de transport (Apache, Tigre, NH90, MH-60R et MH-60S)
- La plupart des missiles disposant d'un guidage inertiel (Scalp-EG, MDCN, JDAM, JSOW...)
- La plupart des navires militaires (FREMM, Porte-avion CdG, BPC...) et des sous-marins (Barracuda, Rubis...)
- Les obusiers pour leur centrale inertielle de pointage (Caesar, PzH2000, Archer...)
Notes et références
- ↑ « New Inertial Measurement Unit Offers Same Industry Leading Capabilities, but in a Smaller Package », sur aerospace.honeywell.com (consulté le ).
- ↑ Radix 1999, 3.3 Intérêt des gyromètres laser.
- ↑ Radix 1999, 3.4 Performances.
- ↑ a et b Radix 1999, 2.2 Comparaison des trajets optiques.
- ↑ Radix 1999, 2.3 Gyrométrie par comparaison de phase.
- ↑ Radix 1999, 3.1 Constitution.
- ↑ Radix 1999, 3.5 Gyromètre laser triaxe.
- ↑ (en) « Honeywell's ADIRU selected by Airbus », Farnborough, Aviation International News via archive.org, 22—28 July 2002 (version du sur Internet Archive)
- ↑ (en) Digital Avionics Systems, IEEE, AIAA, (ISBN 978-0-7803-3050-4, lire en ligne).
Voir aussi
Bibliographie
- Jean-Claude Radix, Gyromètres optiques, Éditions techniques de l'ingénieur, (lire en ligne)
Articles connexes
 Portail de la physique
Portail de la physique










