Az egyenes a pont és a sík mellett a geometria egyik alapfogalma. Leírása (és nem definíciója) szerint mindkét irányban végtelen, végtelenül keskeny vonal. Két pont közötti legrövidebb út szakasz.
A modern axiomatikus elméletekben az egyenes belső tulajdonságok nélküli objektum; csak a más egyenesekkel, pontokkal és síkokkal való kapcsolata érdekes.
Az analitikus geometriában az egyenes ponthalmaz. Pontosabban, az affin geometriában az egyenes egydimenziós altér.
Az egyenes definiálhatóságáról
Euklidész Kr. e. 300 körül megjelent művében, az Elemekben először a vonalat definiálta:
„A vonal szélesség nélküli hosszúság”
és csak ezután következik az egyenes:
„Egyenes vonal az, amelyik a rajta levő pontokhoz viszonyítva egyenlően fekszik.”[1]
Ez a megfogalmazás Eukleidész azon törekvéséből fakad, hogy mindent, amivel foglalkozik, pontosan meghatározzon, minden logikai rést lefedjen. Manapság az egyenest az elemi geometria axiomatikus tárgyalásában (például a Hilbert-féle axiómarendszerben) alapfogalomnak tekintjük, azaz nem vezetjük vissza további definícióval más fogalmakra.
Másrészt az elemi geometria modelljeiben természetesen meg kell adnunk az egyenesnek megfelelő entitások halmazát, például a koordinátamodellben mint egy háromdimenziós vektortér egydimenziós altereinek eltoltjainak halmazát.
Tulajdonságai
Habár nincs definiálva, mindenkiben él egy kép az egyenesről, amely szerint az egyenes egy pontokból álló 1 dimenziós objektum, azaz például a tér egy irányában végtelen hosszú, a többiben kiterjedés nélküli. A geometriában az egyenes következő tulajdonságait használjuk ki:
Két pont egyértelműen meghatároz egy egyenest, amiből következik, hogy két különböző egyenesnek nem lehet egynél több közös pontja.
Ha egy síknak és egy egyenesnek legalább két közös pontja van, akkor az egyenes illeszkedik az adott síkra.
Ha egy egyenes pontjai és az és pontok között fekszik, akkor egyszersmind a pont a és pontok között is fekszik.
Ha egy egyenes pontjai, akkor létezik olyan pontja az egyenesnek, amely az és pontok között fekszik, és egyszersmind létezik olyan pontja, hogy a pont az és pontok között is fekszik.
Az egyenes tetszőleges három pontja közül pontosan egy olyan pont van, amely a másik két pont között fekszik.
A projektív geometriában él a dualitás tétele (egyes rendszerek szerint axiómája). Ez egy szimmetriaelv, hogy ha egy dimenziós térben állítunk valamit a dimenziós és az dimenziós alterek illeszkedési tulajdonságairól, akkor az állítás igazságtartalma megmarad, ha a dimenziós alterek helyett , az dimenziós altereket dimenziósakra cseréljük, az illeszkedési relációt pedig megtartjuk. Speciálisan, projektív síkokon az egyenesek és pontok duálisak. Így projektív síkokon képzelhető a pont végtelen hosszúnak, és az egyenes minden irányból végtelenül kicsinek. Három dimenziós projektív terekben a pontok és a síkok duálisak egymással, az egyenesek pedig egyenesekkel duálisak.
Egyenes megadása az analitikus geometriában
Az analitikus geometriában a geometriai tér egy -dimenziós vektortér a valós számok felett. Az egyenes egydimenziós affin altér, azaz egy -1 dimenziós lineáris altér mellékosztálya.
Három dimenzióban az analitikus geometria eleget tesz a Hilbert-féle axiómarendszernek; így az analitikus geometria egyenesei megfelelnek a Hilbert-féle axiómarendszereinek.
Egy egyenes egyenlete
olyan egyenlet, melyet az egyenes minden pontja teljesít, és ha egy pont teljesíti, akkor rajta van az egyenesen.
Ha adott az egyenes egy pontja és egy irányvektora:[5], ahol a t valós paraméter.
Kicsit átalakítva az előző egyenletrendszert (amennyiben , azaz az irányvektor egyik koordinátája sem 0, nem párhuzamos egyik koordináta-tengellyel sem):
Az n dimenziós térben az egyenest egy n változós egyenletrendszer adja meg, amiben van egy független paraméter
Legyen helyvektor, irányvektor. Ekkor a ponton átmenő irányú egyenes egyenlete:
.
Legyenek helyvektorok úgy, hogy . Ekkor egyértelműen létezik egy egyenes, ami mindkettőre illeszkedik, és egyenlete:
.
Két különböző vektor affin burka egyenes:
, ahol , a vektorok.
Egyenesek kölcsönös helyzete
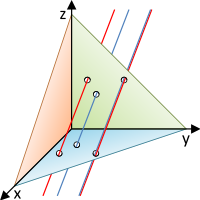
Egyenesek kölcsönös helyzete (pirossal és kékkel) a térben
valódi párhuzamosság (balra) és egybeesés (jobbra)
metsző (a fekete pontban)
kitérő
Párhuzamosság: A két egyenes eltolással átvihető egymásba. A párhuzamosság ekvivalenciareláció.
Egybeesés: A két egyenes összes pontja ugyanaz, azaz ponthalmazként megegyeznek. Nullvektorral való eltolással vihetők egymásba-
Valódi párhuzamosság: A két egyenes nem esik egybe, de irányuk megegyezik. Nullvektortól különböző vektorral való eltolással átvihetők egymásba.
Metszők: Az egyeneseknek egy közös pontja van.
Kitérők: Az egyeneseknek nincs közös pontjuk, és nem vihetők eltolással egymásba. Csak legalább háromdimenziós térben lehetséges.
Metszéspont a síkban
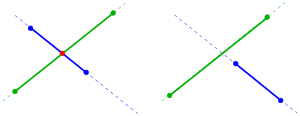
Metsző, illetve nem metsző szakaszok a síkban
A síkban két, egyenlettel adott, metsző egyenes metszéspontjának számításához a Cramer-szabály nyújt segítséget:
Ha , akkor az egyenesek párhuzamosak.
Ha az egyenesek két-két pontjukkal adottak, azaz az első egyenes a és pontokkal, a második pedig a és pontokkal, akkor ki kell számítani az egyenesek egyenleteit. Így az metszéspontra adódik, hogy
és
.
Szemben az egyenesekkel, a síkban a nem párhuzamos szakaszok nem feltétlenül metszik egymást. Legyen a két szakasz és . Ekkor a szakaszok paraméteres egyenlettel írhatók le:
,
ahol . Ha létezik az metszéspont, akkor vannak olyan paraméterek, hogy
Ahogy a fenti esetben, úgy most is a Cramer-szabály segít nekünk. Ezután még azt is vizsgálnunk kell, hogy . Ha ez teljesül, akkor a paraméterek behelyettesítésével megkapjuk a szakaszok metszéspontjának koordinátáit.
Legyenek például a szakaszok és . Ekkor az egyenletrendszer
így , és a szakaszok metszik egymást. A metszéspont koordinátái .
Két ponttal adott egyenesek metszéspontja is számítható ugyanígy, ám ekkor nem kell vizsgálni, hogy .
Egyenesek szöge a síkban
Ha egy egyenes egyenlete formában adott, akkor irányszögére, -ra teljesül, hogy:
,
ami következik a tangens definíciójából. Alkalmazva a tangens inverz függvényét, az árkusz tangenst:
Ha ezek az egyenletek nincsenek definiálva, akkor , az egyenes függőleges. A tangensfüggvénynek pólusa van a és az helyen.[6]
Legyenek és a egyenesek a síkban, és legyenek adva az és egyenletekkel adva úgy, hogy és helyvektorok, és és lineárisan független irányvektorok! Ekkor a két egyenes által bezárt szögre teljesül, hogy:
Az egyenesek merőlegesek, más szóval, ortogonálisak akkor, ha derékszöget zárnak be, azaz . Ez pontosan akkor teljesül, ha az irányvektorok skaláris szorzata nulla, azaz .[7]
Ha az egyenesek egyenlete és alakban adott, akkor az általuk közrezárt szög, irányszögeik különbsége:
A tangensfüggvény addíciós tételeivel:
Mivel és , következik, hogy:
Végeredményben
Alkalmazva a tangens inverz függvényét kapjuk, hogy:
Az egyenesek pontosan akkor merőlegesek, ha a nevező nulla, azaz . Ekkor a fenti egyenletek nincsenek értelmezve, mivel a tangensfüggvénynek pólusa van a és az helyen.[6]
Távolságok a síkban
Adva legyen a pont, és az egyenletű egyenes. Távolságuk:
Az egyenes ponthoz legközelebbi pontjának koordinátái:
Ha az egyenes két pontjával van adva, akkor alakú egyenletének együtthatói:
és ezek az együtthatók helyettesíthetők be a képletekbe.[8]
Távolságok a térben
A pont és az , illetve pontokon átmenő egyenes távolsága: [9]
Ha az egyik egyenes a és pontokon, a másik a és pontokon halad át, akkor távolságuk:[10]
↑Gyakran felteszik, hogy a normálvektor egység hosszú, azaz . Ez elsősorban kényelmi szempont, mert ekkor sok számítás leegyszerűsödik.
↑Az egyenes és az x-tengely pozitív fele által bezárt szög (irányszög) tangense. Más megközelítésből: azt mondja meg, hogy az egyenes mennyit halad felfelé (negatív érték esetén lefelé), amíg 1-et megy jobbra. Függőleges egyeneseknél nincs értelmezve.
Ez a szócikk részben vagy egészben a Gerade című német Wikipédia-szócikk fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.













































 valódi párhuzamosság (balra) és egybeesés (jobbra)
valódi párhuzamosság (balra) és egybeesés (jobbra)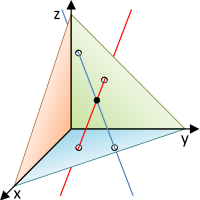 metsző (a fekete pontban)
metsző (a fekete pontban)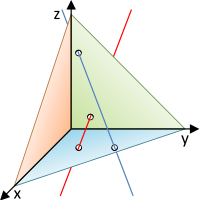 kitérő
kitérő






































































 Matematikaportál • összefoglaló, színes tartalomajánló lap
Matematikaportál • összefoglaló, színes tartalomajánló lap








