 関数
関数  の鞍点
の鞍点 鞍点(あんてん、英: saddle point)は、多変数実関数の変域の中で、ある方向で見れば極大値だが別の方向で見れば極小値となる点である。
鞍部点、峠点とも言う。微分可能な関数については極値を取らない停留点とも言う。
定義
点  が 多変数実関数
が 多変数実関数  の鞍点であるとは、零ベクトルでないある2つのベクトル
の鞍点であるとは、零ベクトルでないある2つのベクトル  と
と  に対し、
に対し、
- 関数
 が
が  で極大となる。
で極大となる。 - 関数
 が で極小となる。
が で極小となる。
が成り立つということである。 極大・極小の定義に、等号を認めるか認めないかで広義と狭義があるため、鞍点の定義にも広義と狭義がある。
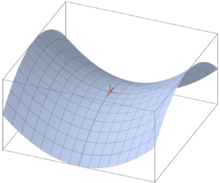
例えば、図の2変数関数 において、点を原点  とし方向を
とし方向を  とすると、関数
とすると、関数 は点で極小となり、点を原点 とし方向を
は点で極小となり、点を原点 とし方向を  とした関数
とした関数 は点で極大となるので、点は2変数関数 の鞍点となる。
は点で極大となるので、点は2変数関数 の鞍点となる。
特徴
微分可能な多変数実関数の停留点(勾配ベクトルが零ベクトルとなる点、つまり、接平面が水平になる点)は、鞍点か極値である。
関連項目












